Concevoir et réaliser une plateforme expérimentale de faisceau laser asservi en position
L’intérêt de ce projet PIMS
- Réaliser un prototype complet et le caractériser
- Faire le lien entre la représentation théorique d’un système et sa réalité physique
- Comprendre de façon pratique ce qu’est un asservissement, un régulateur
- Mettre en œuvre différents types de régulateurs linéaires
Présentation du sujet
Dans de nombreuses applications, on utilise des lasers dont le faisceau doit être pointé sur une cible avec une grande précision. Par exemple lorsque l’on crée des étoiles artificielles pour l’observation astronomique par optique adaptative, les étoiles artificielles doivent être créées à une certaine position angulaire et à une certaine altitude. La présence de l’atmosphère fait dévier le faisceau, et ces déviations peuvent être compensées par des petits miroirs plans dits de basculement (ou de tip/tilt) grâce à un asservissement utilisant la mesure des écarts à la position voulue.
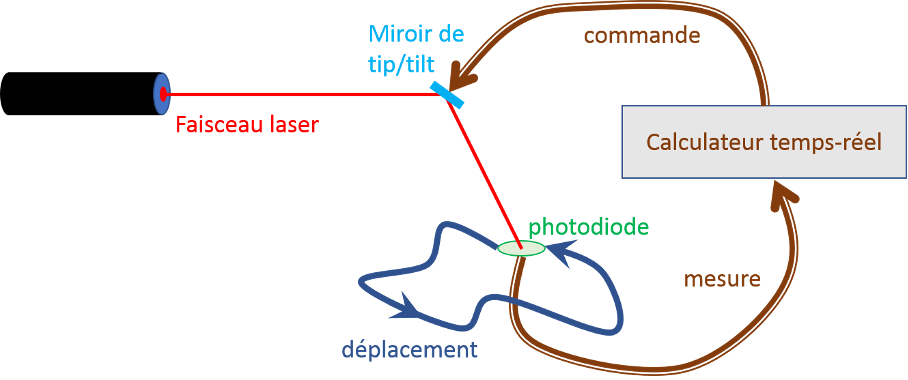
Une problématique très similaire consiste à asservir un faisceau laser au centre d’une photodiode soumise à des déplacements aléatoires. Les miroirs de tip/tilt doivent alors dévier le faisceau laser pour qu’il pointe au centre de la photodiode, et l’asservissement utilise la mesure de l’écart par rapport au centre de la photodiode. Un schéma simplifié est proposé ci-dessous :
Une plateforme expérimentale comportant en guise de miroir de tip/tilt deux moteurs de type « scanner » pilotés par une électronique continue est actuellement disponible au LEnsE. Le but de ce projet PIMS est de réaliser un nouveau prototype piloté par des cartes numériques.
Les différentes tâches
Les tâches à effectuer dans ce projet sont multiples :
- Définir le cahier des charges de la plateforme expérimentale (schéma de conception, spécifications des performances du système global et des composants, sorties et mesures d’intérêt)
- Réaliser le montage et mettre en œuvre un système piloté en temps discret avec une carte de type Arduino
- Implémenter une structure de calcul qui permette de tester plusieurs types de régulateurs linéaires (proportionnel-intégral-dérivé (PID), commande prédictive, etc.)
- Caractériser les performances du système
- Évaluer la possibilité de réaliser le montage à bas coût pour pouvoir à terme proposer ces plateformes lors des TP d’automatique
Encadrement
- Caroline Kulcsár, enseignante-chercheure, Laboratoire Charles Fabry
- Julien Villemejane, enseignant , LEnsE
| Modalités | Semaine 1 | Réalisations