Alliez caméras, éclairages et algorithmes pour donner vie à un œil électronique capable de détecter couleurs et formes avec précision industrielle. Ce projet combine colorimétrie, traitement d’image et programmation Python/OpenCV pour développer des applications concrètes autour de la détection d’objets.
Problématique
La vision industrielle permet aux systèmes automatisés (robots, transports, chaînes de montage, machines-outils, etc.) de voir, analyser et comprendre des images pour prendre des décisions sans intervention humaine. Elle combine optique, capteurs, traitement d’image et intelligence artificielle pour automatiser des tâches de contrôle, guidage et inspection avec rapidité, précision et fiabilité.
Cette méthode comparée au contrôle par l’humain présente de nombreux avantages en termes de performance, de fiabilité, de qualité et de répétabilité des mesures. Elle nécessite cependant de maitriser l’ensemble des éléments de la chaine d’acquisition et de traitement. Le LEnsE souhaite étoffer son catalogue de TP en proposant des expériences portant sur des applications industrielles et sur l’influence de l’éclairage dans la détection des caractéristiques des objets (couleur, forme, taille…).
Ce projet vise à développer un (ou plusieurs) « fil rouge » autour de la colorimétrie et des caméras afin d’illustrer certains TP déjà existants*, tout en s’appropriant les divers éléments de la chaine de traitement de l’image et en proposant des applications autour de la détection d’objets.
* TP Caméra en Interfaçage Numérique (S6), TP Colorimétrie (S7) et TP Bruits dans un capteur CMOS (S8).
Point de départ
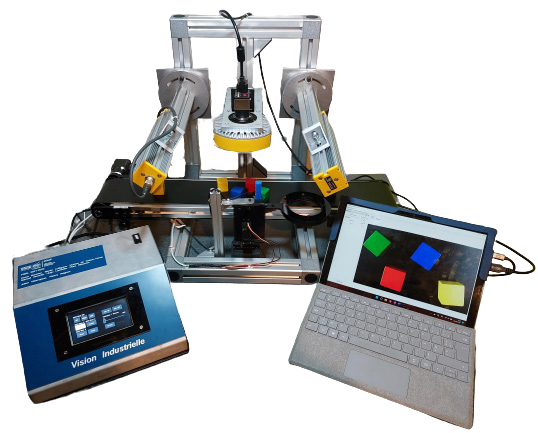
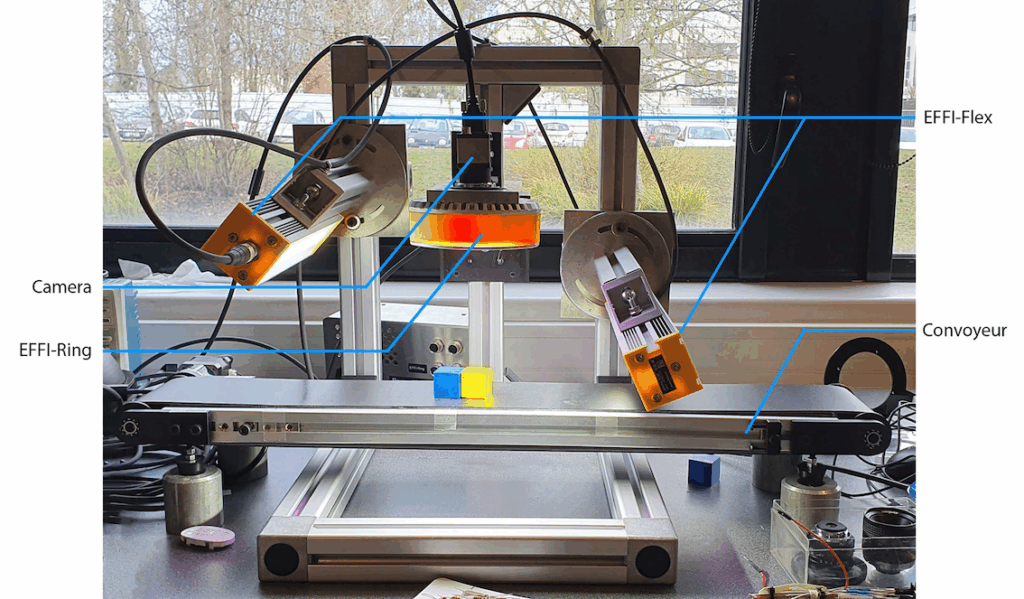
Un démonstrateur constitué d’une caméra, d’un convoyeur et d’un éclairage spécifique a été développé lors d’un précédent projet (voir photos précédente et suivante). En se basant sur ce système (ainsi qu’un banc plus simple utilisé au semestre 6) et en réalisant des caractérisations d’objets (colorimétrie…), vous devrez proposer des applications proches de celles de l’industrie pour la détection de formes et de couleurs, en essayant de mettre en avant les limites des différentes approches : tant sur le point du matériel utilisé (caractéristiques de la caméra, choix de l’objectif et de l’éclairage) que sur les algorithmes choisis.
Travail à réaliser
Détection de la couleur d’un objet
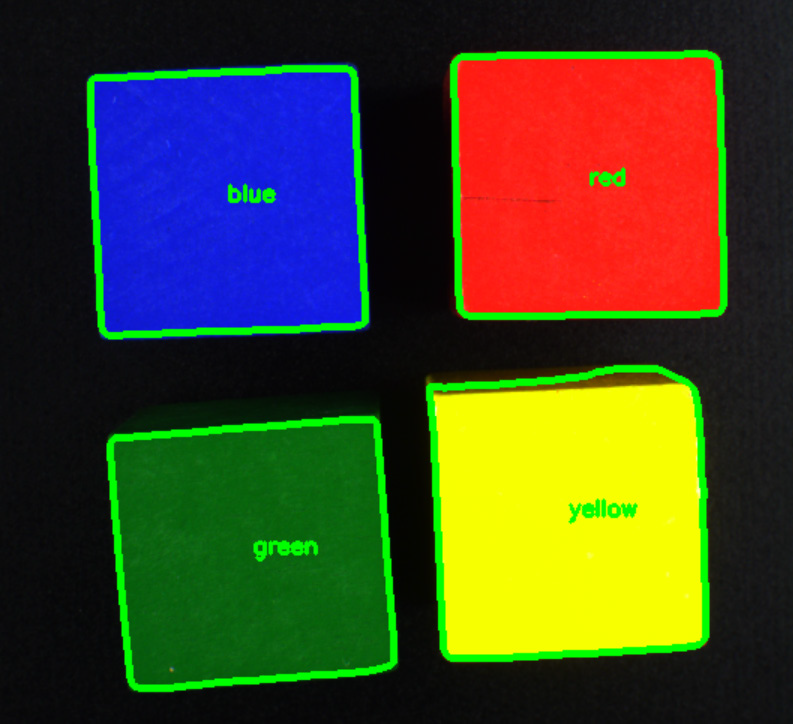
– Importance de la couleur de l’éclairage en fonction de celle des objets à détecter (couleur…)
– Obtention des coordonnées RGB, de la couleur moyenne à l’intérieur d’un contour
– Déduction du nom de la couleur correspondante à partir d’un nuancier
– Calcul de l’intensité lumineuse reçue en fonction du spectre de la source (monochromatique) et de la réflectance d’un objet donné (modélisation simple du système optique)
– …
Détection des contours des objets
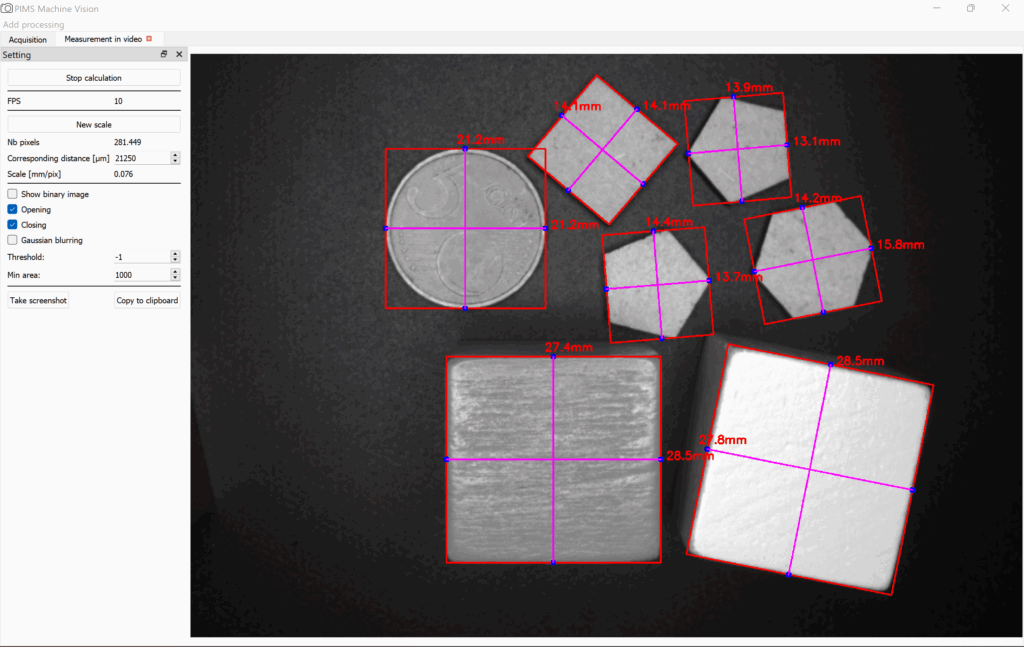
– Calibration de la chaine d’acquisition
– Affichage des dimensions d’un objet (choix par l’utilisateur ou automatique)
– FFT pour mesurer des fréquences spatiales (pas d’une vis)
– …
Qualité d’imagerie de la chaine caméra / objectif
– Observation de mires objets de fréquences différentes
– Evaluation de l’évolution de la FTM du système en fonction du niveau de lumière et de l’ouverture de l’objectif
Compétences et savoir-faire abordés
Expliquer le rôle des différents éléments d’une chaine d’acquisition de l’image (optique instrumentale, capteurs CMOS, interaction lumière-matière)
Mettre en œuvre un banc de vision industrielle, dans le cas d’exemples simples de détection d’objets
Mettre en œuvre des programmes de détection des objets, en se basant sur Python et OpenCV
Certaines notions sur les capteurs et sur les éclairages seront vues lors des semaines de projet.
Encadrement
Julien VILLEMEJANE
Thierry AVIGNON