Retour Thème 3 Ressources S5 Modalités S5 Objectifs pédagogiques S5
Dans ce sujet du troisième thème, vous allez piloter un moteur à courant continu et l’asservir en position.
Cahier des charges
Le système devra pouvoir :
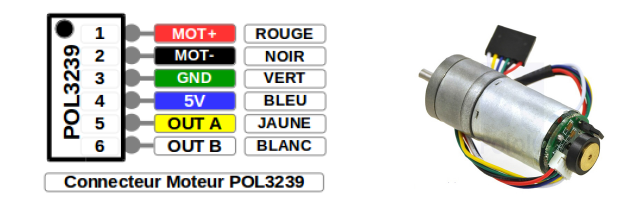
- Piloter un moteur à courant continu (type Pololu 3039) dans les deux directions
- Acquérir le signal du capteur de position
- Calculer et afficher l’erreur entre la position réelle et la consigne
- Asservir la position du rotor à la consigne
Le traitement numérique devra être réalisé à l’aide d’une carte Nucléo L476RG ou G431RB.
Les performances, en particulier en terme de fréquence maximale de rafraichissement de la boucle d’asservissement, devront être mesurées.
Etapes
A réécrire
- Comprendre le fonctionnement d’un moteur à courant continu
- Piloter un moteur à courant continu dans les deux directions
- Visualiser les signaux des capteurs (voies A et B)
- Acquérir ces signaux et compter le nombre de pas (et l’afficher)
- Imposer un signal analogique de consigne externe
- Calculer l’erreur entre la position et la consigne
- Afficher ce signal au format analogique
- Asservir le moteur en position
- Corriger l’asservissement par un correcteur PI
Thème 3 / Asservissement Moteur